Perfect Model Site-Level Calibration Tutorial
This tutorial demonstrates how to perform a perfect model calibration experiment using ClimaLand. In a perfect model experiment, we generate synthetic observations from our model with known parameters, then use ensemble Kalman inversion to recover those parameters. This approach allows us to evaluate the calibration method without the influence of model structural errors.
In this tutorial we will calibrate the Vcmax25 parameter using latent heat flux observations from the FLUXNET site (US-MOz).
Overview
The tutorial covers:
- Setting up a land surface model for a FLUXNET site (US-MOz)
- Creating a synthetic observation dataset
- Implementing Ensemble Kalman Inversion
- Analyzing the calibration results
Setup and Imports
Load all the necessary packages for land surface modeling, diagnostics, plotting, and ensemble methods:
using ClimaLand
using ClimaLand.Domains: Column
using ClimaLand.Canopy
using ClimaLand.Simulations
import ClimaLand.FluxnetSimulations as FluxnetSimulations
import ClimaLand.Parameters as LP
import ClimaLand.LandSimVis as LandSimVis
import ClimaDiagnostics
import EnsembleKalmanProcesses as EKP
import EnsembleKalmanProcesses.ParameterDistributions as PD
using CairoMakie
CairoMakie.activate!()
using Statistics
using Logging
import Random
using Dates
using ClimaAnalysis, GeoMakie, PrintfConfiguration and Site Setup
Configure the experiment parameters and set up the FLUXNET site (US-MOz) with its specific location, time settings, and atmospheric conditions.
Set random seed for reproducibility and floating point precision
rng_seed = 1234
rng = Random.MersenneTwister(rng_seed)
const FT = Float32Float32Initialize land parameters and site configuration.
toml_dict = LP.create_toml_dict(FT)
site_ID = "US-MOz"
site_ID_val = FluxnetSimulations.replace_hyphen(site_ID):US_MOzGet site-specific information: location coordinates, time offset, and sensor height.
(; time_offset, lat, long) =
FluxnetSimulations.get_location(FT, Val(site_ID_val))
(; atmos_h) = FluxnetSimulations.get_fluxtower_height(FT, Val(site_ID_val))(atmos_h = 32.0f0,)Get maximum simulation start and end dates
(start_date, stop_date) =
FluxnetSimulations.get_data_dates(site_ID, time_offset)
stop_date = DateTime(2010, 4, 1, 6, 30) # Set the stop date manually
Δt = 450.0 # seconds450.0Domain and Forcing Setup
Create the computational domain and load the necessary forcing data for the land surface model.
Create a column domain representing a 2-meter deep soil column with 10 vertical layers.
zmin = FT(-2) # 2m depth
zmax = FT(0) # surface
domain = Column(; zlim = (zmin, zmax), nelements = 10, longlat = (long, lat));Load prescribed atmospheric and radiative forcing from FLUXNET data
forcing = FluxnetSimulations.prescribed_forcing_fluxnet(
site_ID,
lat,
long,
time_offset,
atmos_h,
start_date,
toml_dict,
FT,
);Model Setup
Create an integrated land model that couples canopy, snow, soil, and soil CO2 components. This comprehensive model allows us to simulate the full land surface system and its interactions.
function model(Vcmax25)
#md # Get Leaf Area Index (LAI) data from MODIS satellite observations.
LAI = ClimaLand.Canopy.prescribed_lai_modis(
domain.space.surface,
start_date,
stop_date,
)
Vcmax25 = FT(Vcmax25)
#md # Set up ground conditions and define which components to simulate prognostically
ground = ClimaLand.PrognosticGroundConditions{FT}()
prognostic_land_components = (:canopy, :snow, :soil, :soilco2)
#md # Prepare canopy domain and forcing
canopy_domain = ClimaLand.Domains.obtain_surface_domain(domain)
canopy_forcing = (; forcing.atmos, forcing.radiation, ground)
#md # Set up photosynthesis parameters using the Farquhar model
photosyn_defaults =
Canopy.clm_photosynthesis_parameters(canopy_domain.space.surface)
photosynthesis = Canopy.FarquharModel{FT}(
canopy_domain,
toml_dict;
photosynthesis_parameters = (;
fractional_c3 = photosyn_defaults.fractional_c3,
Vcmax25,
),
)
conductance = Canopy.MedlynConductanceModel{FT}(
canopy_domain,
toml_dict;
g1 = FT(141),
)
#md # Create canopy model
canopy = ClimaLand.Canopy.CanopyModel{FT}(
canopy_domain,
canopy_forcing,
LAI,
toml_dict;
photosynthesis,
prognostic_land_components,
conductance,
)
#md # Create integrated land model
land_model = LandModel{FT}(
forcing,
LAI,
toml_dict,
domain,
Δt;
prognostic_land_components,
canopy,
)
#md # Set initial conditions from FLUXNET data
set_ic! = FluxnetSimulations.make_set_fluxnet_initial_conditions(
site_ID,
start_date,
time_offset,
land_model,
)
#md # Configure diagnostics to output sensible and latent heat fluxes hourly
output_vars = ["shf", "lhf"]
diagnostics = ClimaLand.default_diagnostics(
land_model,
start_date;
output_writer = ClimaDiagnostics.Writers.DictWriter(),
output_vars,
reduction_period = :hourly,
)
#md # Create and run the simulation
simulation = Simulations.LandSimulation(
start_date,
stop_date,
Δt,
land_model;
set_ic!,
user_callbacks = (),
diagnostics,
)
solve!(simulation)
return simulation
endmodel (generic function with 1 method)Observation and Helper Functions
Define the observation function G that maps from parameter space to observation space, along with supporting functions for data processing:
This function runs the model and computes diurnal average of latent heat flux
function G(Vcmax25)
simulation = model(Vcmax25)
lhf = get_lhf(simulation)
observation =
Float64.(
get_diurnal_average(
lhf,
simulation.start_date,
simulation.start_date + Day(20),
),
)
return observation
endG (generic function with 1 method)Helper function: Extract latent heat flux from simulation diagnostics
function get_lhf(simulation)
return ClimaLand.Diagnostics.diagnostic_as_vectors(
simulation.diagnostics[1].output_writer,
"lhf_1h_average",
)
endget_lhf (generic function with 1 method)Helper function: Compute diurnal average of a variable
function get_diurnal_average(var, start_date, spinup_date)
(times, data) = var
model_dates = if times isa Vector{DateTime}
times
else
Second.(getproperty.(times, :counter)) .+ start_date
end
spinup_idx = findfirst(spinup_date .<= model_dates)
model_dates = model_dates[spinup_idx:end]
data = data[spinup_idx:end]
hour_of_day = Hour.(model_dates)
mean_by_hour = [mean(data[hour_of_day .== Hour(i)]) for i in 0:23]
return mean_by_hour
endget_diurnal_average (generic function with 1 method)Perfect Model Experiment Setup
Since this is a perfect model experiment, we generate synthetic observations from our target parameter value. This parameter will be recovered by the calibration.
true_Vcmax25 = 0.0001 # [mol m-2 s-1]
observations = G(true_Vcmax25)24-element Vector{Float64}:
63.95655059814453
14.208337783813477
5.3040547370910645
2.8854637145996094
15.992982864379883
7.100071430206299
3.8541440963745117
10.868578910827637
6.068470478057861
3.571577787399292
7.790356636047363
5.107797145843506
3.706186294555664
4.454278469085693
3.1153221130371094
2.413902521133423
30.623985290527344
34.584625244140625
35.72889709472656
56.422325134277344
62.6924934387207
70.86376190185547
60.439266204833984
61.695899963378906Define observation noise covariance for the ensemble Kalman process. A flat covariance matrix is used here for simplicity.
noise_covariance = 0.05 * EKP.ILinearAlgebra.UniformScaling{Float64}
0.05*IPrior Distribution and Calibration Configuration
Set up the prior distribution for the parameter and configure the ensemble Kalman inversion:
Constrained Gaussian prior for Vcmax25 with bounds [0, 2e-3]
prior = PD.constrained_gaussian("Vcmax25", 1e-3, 5e-4, 0, 2e-3)ParameterDistribution with 1 entry
'Vcmax25': Parameterized (Normal) [1 constraint]
Set the ensemble size and number of iterations
ensemble_size = 10
N_iterations = 33Ensemble Kalman Inversion
Initialize and run the ensemble Kalman process:
Sample the initial parameter ensemble from the prior distribution
initial_ensemble = EKP.construct_initial_ensemble(rng, prior, ensemble_size)
ensemble_kalman_process = EKP.EnsembleKalmanProcess(
initial_ensemble,
observations,
noise_covariance,
EKP.Inversion();
scheduler = EKP.DataMisfitController(
terminate_at = Inf,
on_terminate = "continue",
),
rng,
)EnsembleKalmanProcess
process : Inversion
N_ens : 10
N_par : 1
n_iter : 0
scheduler : DataMisfitController
accelerator: NesterovAccelerator
Run the ensemble of forward models to iteratively update the parameter ensemble
Logging.with_logger(SimpleLogger(devnull, Logging.Error)) do
for i in 1:N_iterations
println("Iteration $i")
params_i = EKP.get_ϕ_final(prior, ensemble_kalman_process)
G_ens = hcat([G(params_i[:, j]...) for j in 1:ensemble_size]...)
EKP.update_ensemble!(ensemble_kalman_process, G_ens)
end
endIteration 1
Iteration 2
Iteration 3
Results Analysis and Visualization
Get the mean of the final parameter ensemble:
EKP.get_ϕ_mean_final(prior, ensemble_kalman_process)1-element Vector{Float64}:
0.0018393893128537935Now, let's analyze the calibration results by examining parameter evolution and comparing model outputs across iterations.
Plot the parameter ensemble evolution over iterations to visualize convergence:
dim_size = sum(length.(EKP.batch(prior)))
fig = CairoMakie.Figure(size = ((dim_size + 1) * 500, 500))
for i in 1:dim_size
EKP.Visualize.plot_ϕ_over_iters(
fig[1, i],
ensemble_kalman_process,
prior,
i,
)
end
EKP.Visualize.plot_error_over_iters(
fig[1, dim_size + 1],
ensemble_kalman_process,
)
CairoMakie.save("perfect_model_constrained_params_and_error.png", fig);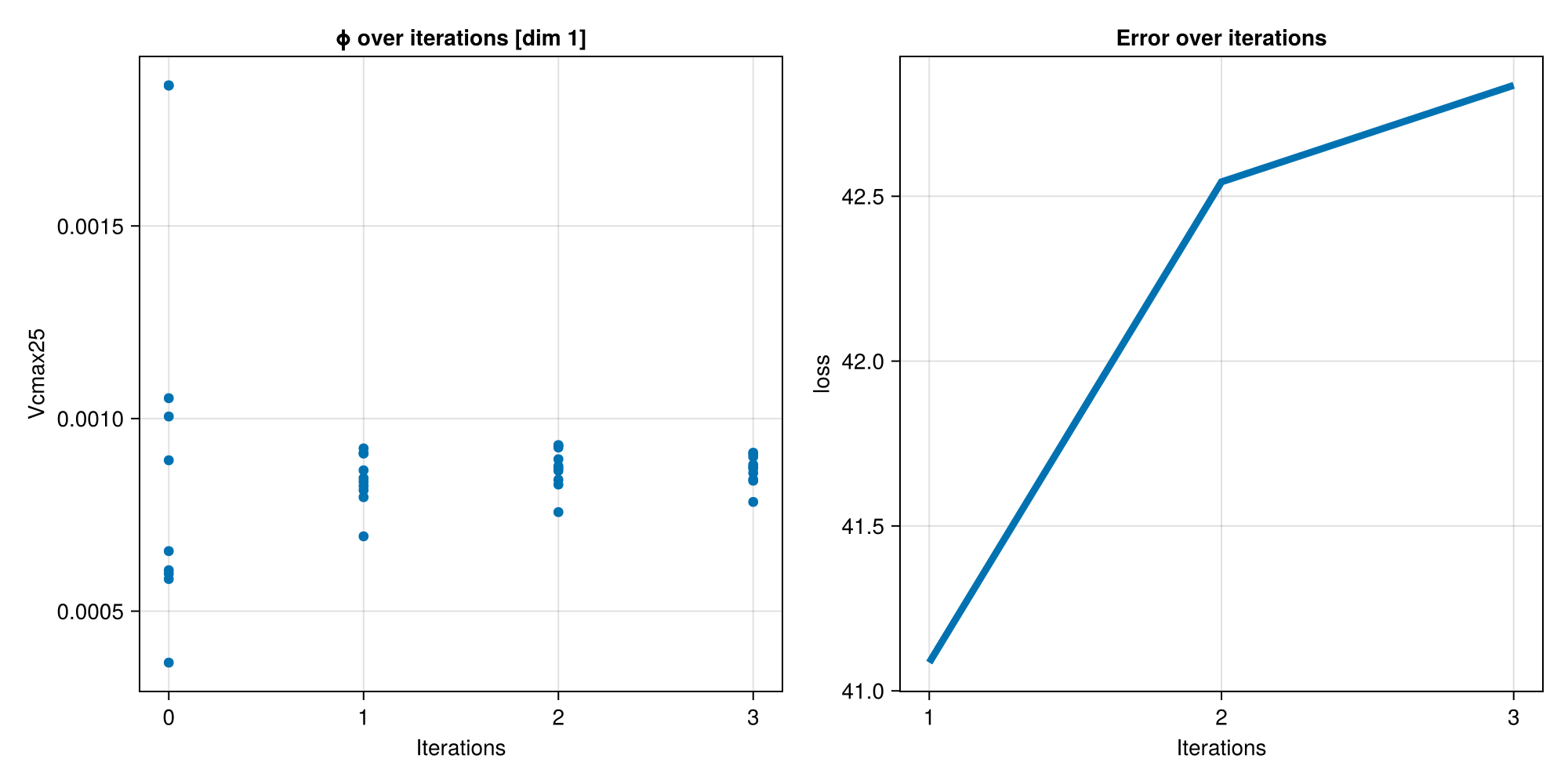
Compare the model output between the first and last iterations to assess improvement:
fig = CairoMakie.Figure(size = (900, 400))
first_G_ensemble = EKP.get_g(ensemble_kalman_process, 1)
last_iter = EKP.get_N_iterations(ensemble_kalman_process)
last_G_ensemble = EKP.get_g(ensemble_kalman_process, last_iter)
n_ens = EKP.get_N_ens(ensemble_kalman_process)
ax = Axis(
fig[1, 1];
title = "G ensemble: first vs last iteration (n = $(n_ens), iters 1 vs $(last_iter))",
xlabel = "Observation index",
ylabel = "G",
)Makie.Axis with 0 plots:
Plot model output of first vs last iteration ensemble
for g in eachcol(first_G_ensemble)
lines!(ax, 1:length(g), g; color = (:red, 0.6), linewidth = 1.5)
end
for g in eachcol(last_G_ensemble)
lines!(ax, 1:length(g), g; color = (:blue, 0.6), linewidth = 1.5)
end
lines!(
ax,
1:length(observations),
observations;
color = (:black, 0.6),
linewidth = 3,
)
axislegend(
ax,
[
LineElement(color = :red, linewidth = 2),
LineElement(color = :blue, linewidth = 2),
LineElement(color = :black, linewidth = 4),
],
["First ensemble", "Last ensemble", "Observations"];
position = :rb,
framevisible = false,
)
CairoMakie.resize_to_layout!(fig)
CairoMakie.save("perfect_model_G_first_and_last.png", fig);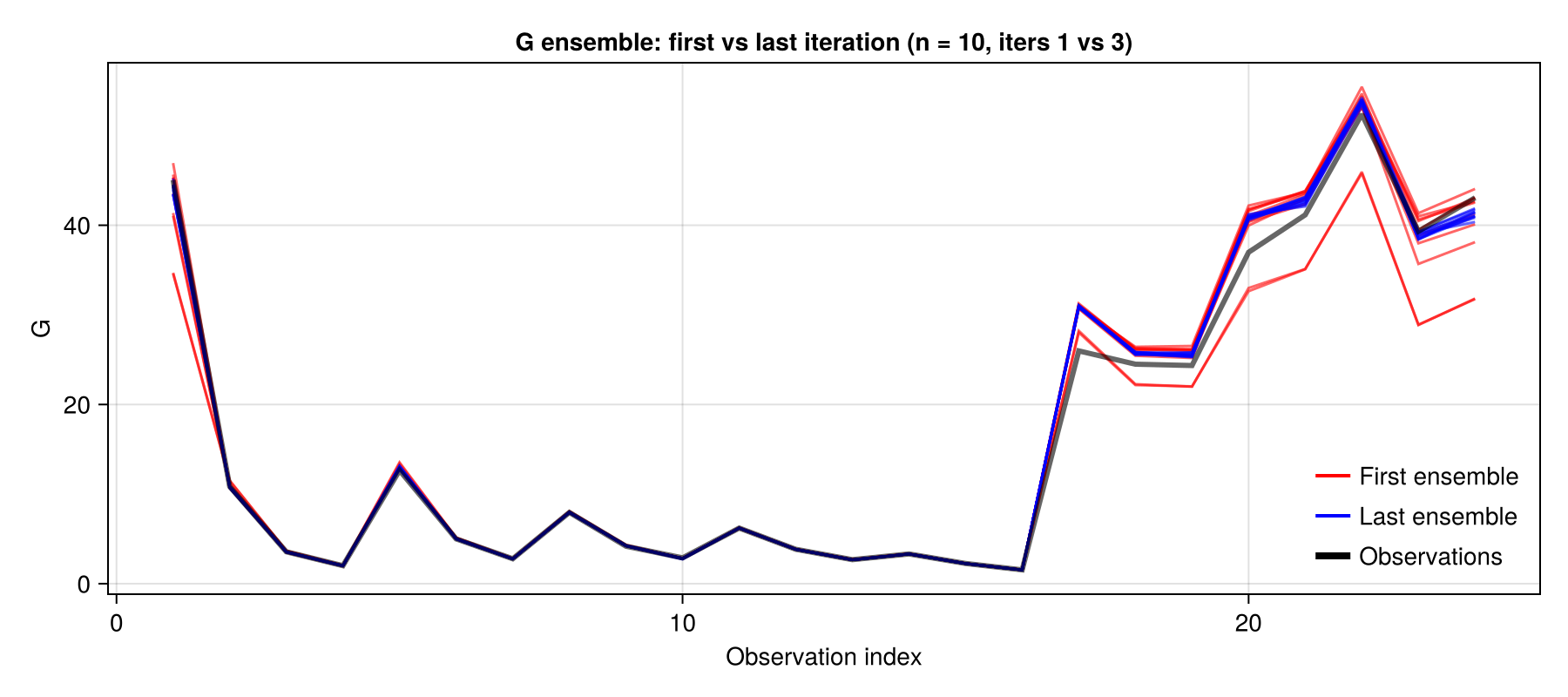
This page was generated using Literate.jl.